Stereo Vision
#Computers
A way to get 3D information from 2D images
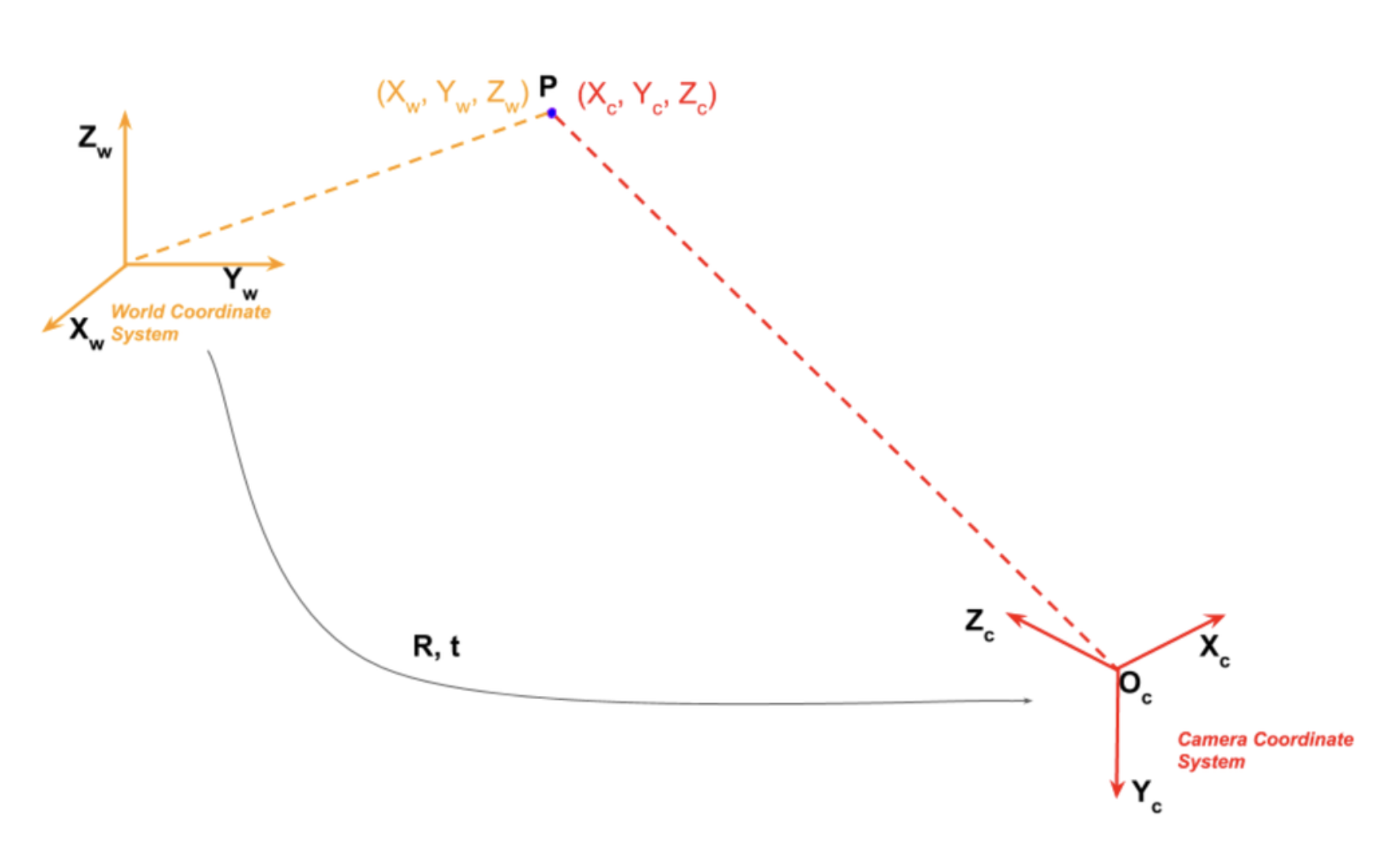
$$
\begin{bmatrix}
X_{c} \\Y_{c} \\Z_{c}
\end{bmatrix}=\mathbf{R}
\begin{bmatrix}
X_{w} \\Y_{w} \\Z_{w}
\end{bmatrix}+\vec{t}=
[\mathbf{R}|t]
\begin{bmatrix}
X_{w} \\Y_{w} \\Z_{w}
\end{bmatrix}
$$
- $\displaystyle \mathbf{R}$ is the rotation matrix in 3D
- $\displaystyle \vec{t}$ is a translation vector
- $\displaystyle [\mathbf{R}|t]$ is called the extrinsic matrix