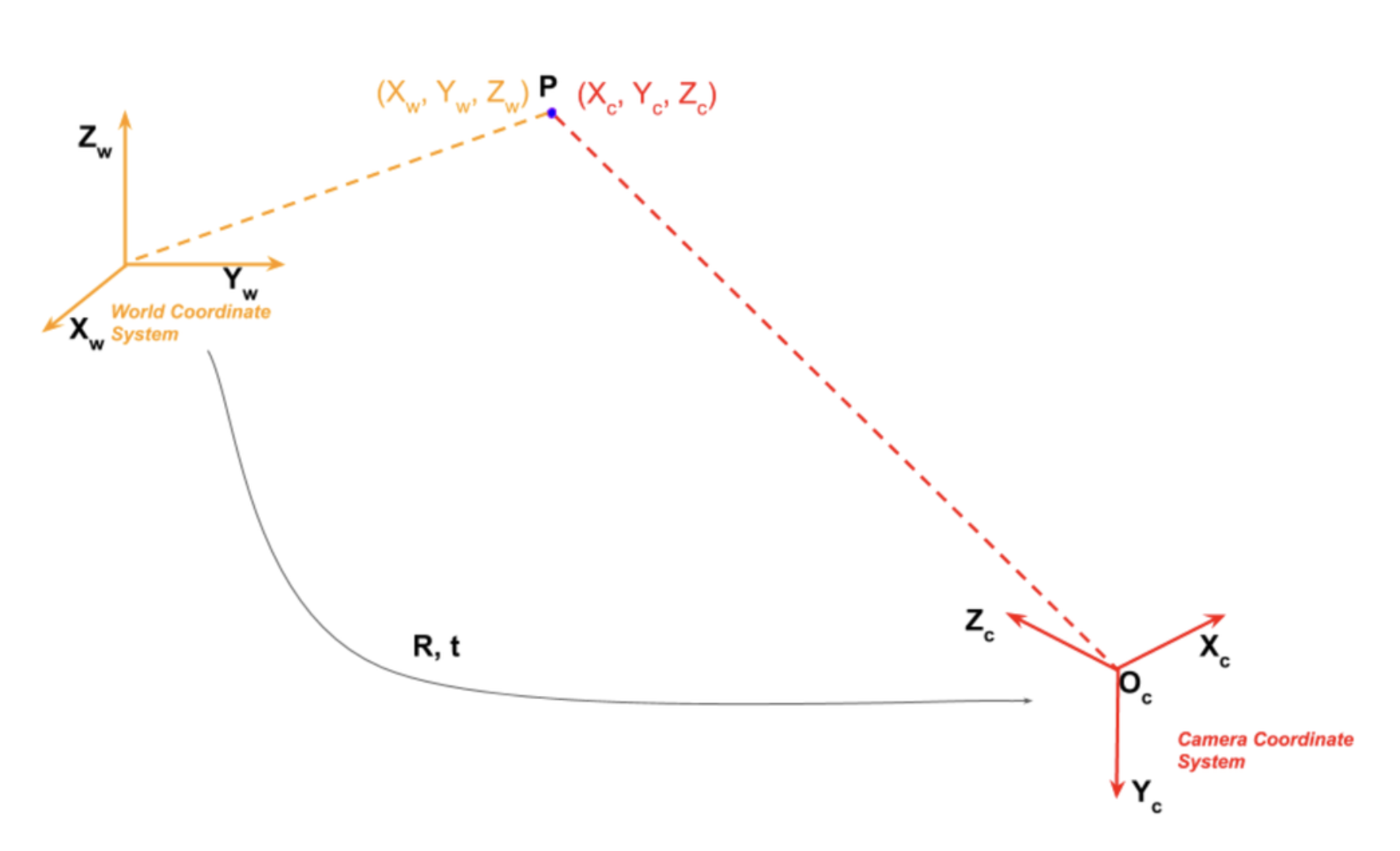
A way to get 3D information from 2D images XcYcZc=RXwYwZw+t=[R∣t]XwYwZw R is the rotation matrix in 3D t is a translation vector [R∣t] is called the extrinsic matrix